Space Suit RoboGlove (SSRG)
Robotics Automation and Control
Space Suit RoboGlove (SSRG) (MSC-TOPS-80)
Advancements in spacesuit robotic glove may yield terrestrial benefits
Overview
Innovators at NASA Johnson Space Center (JSC) have created an enhanced second-generation, robotically assisted extravehicular activity (EVA) glove. The SSRG has been engineered to further decrease the exertion required to do complex, hand-intensive EVA tasks and reduce the risk of astronaut hand injury. Originating from its predecessors, the NASA/General Motors RoboGlove, and the later first-generation Space Suit RoboGlove, the SSRG realizes improved sensing, control, interface, and avionics capabilities. Among these improvements is the implementation of a “power steering mode”, which allows the user to position his/her fingers in an arbitrarily chosen position and receive assistance in holding that position. The SSRG retains the ability to operate like a conventional space suit glove while the actuators are unpowered. The design intent for the SSRG is to enhance a user’s ability to perform human scale work, with considerations for speed, power, durability, dexterity, and ease of operation.
The Technology
NASA is currently developing the next generation space suit for future missions, including the optimization of space suit gloves. When non-assisted space suit gloves are coupled to a pressurized suit and operated in a vacuum, they tend to limit the range of motion of an astronaut's hand to as little as 20% of normal range. Many of NASA's future missions will be in challenging environments where an astronaut’s hand dexterity will be critical for the success of NASA missions. Innovators at JSC have improved the performance on the second-generation, robotically assisted SSRG, to reduce exertion and improve the hand strength and dexterity of an astronaut in situ.
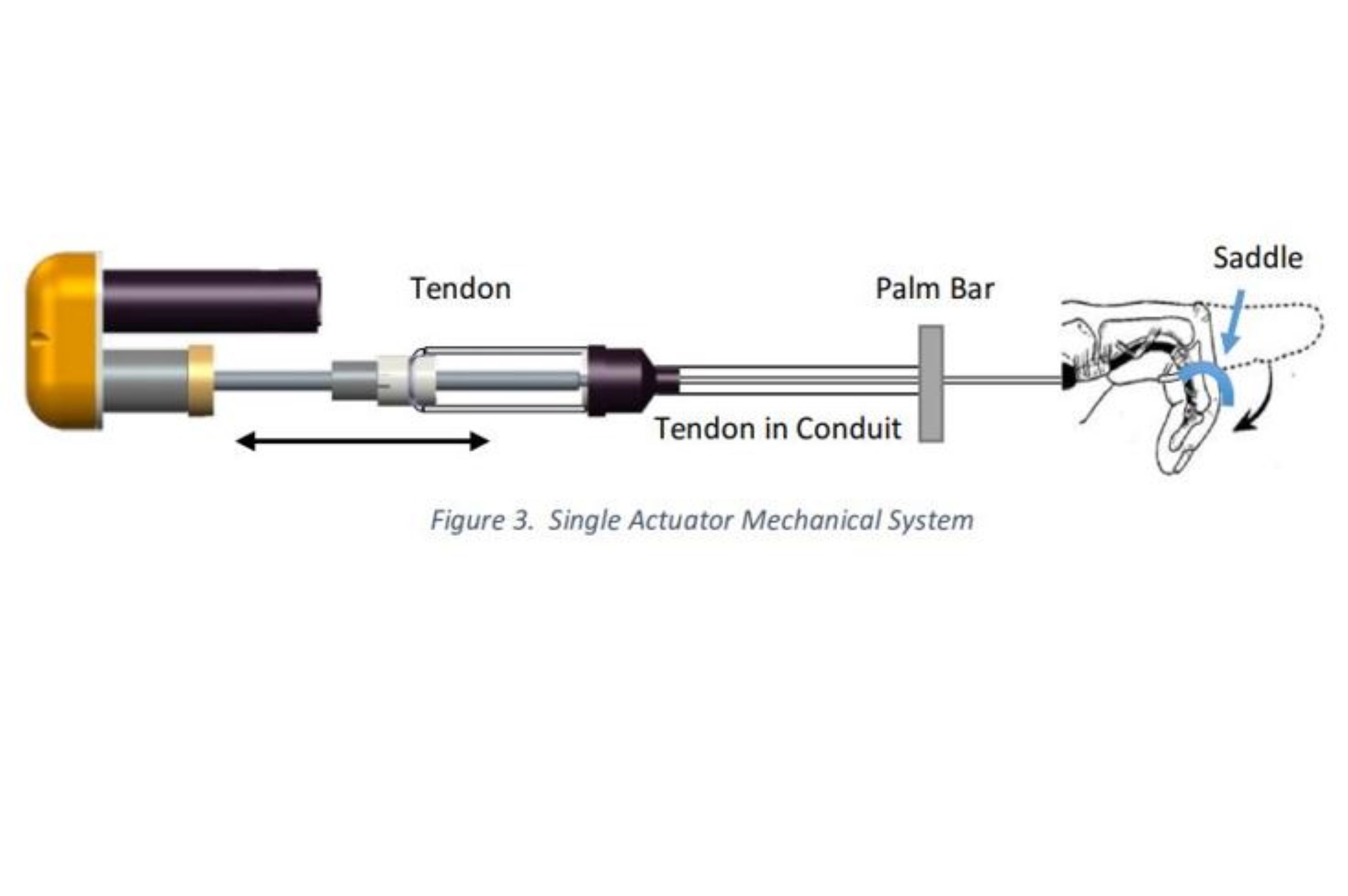
The SSRG’s system detects user finger movements using string potentiometers and contact with objects using force-sensitive resistors (FSRs). FSRs are imbedded in the distal and medial phalanges, palmar side of the glove. To move a finger, an actuator pulls a tendon through a Bowden Cable system which transfers mechanical pulling force of an inner cable relative to a hollow outer cable, like the brakes on a bicycle, as seen in the Figure below. An improved controller commands the new, more powerful linear actuator to drive tendon operation while minding custom controller parameters inputted through a digital editor tool.
The Space Suit RoboGlove is at TRL 6 (system/subsystem model or prototype demonstrated in a relevant environment) and it is now available for licensing. Please note that NASA does not manufacture products itself for commercial sale.
Benefits
- “Power-steering mode” allows user to receive assistance holding arbitrarily chosen position
- Decreases exertion required to do complex, hand-intensive tasks
- Reduces risk of hand injury
- New actuator realizes greater force output, increased efficiency, higher thermal mass, improved reliability, and ease of maintenance
- Improved sensing, control, interface, and avionics capabilities over first-generation glove
- Capable of providing 9 assistive modes
- Back drivability of actuators ensures user unpowered mobility
Applications
- Manufacturing: operation of hand tools and hand-gripping manual labor for extended periods of time
- Healthcare: development of rehabilitation aids, and assistance of patients with impaired hand muscle strength
Technology Details
Robotics Automation and Control
MSC-TOPS-80
MSC-26236-1
MSC-26273-1
MSC-26236-2
MSC-26273-2
|
Related Links:
|
Similar Results

Robo-Glove
Originally developed by NASA and GM, the Robo-Glove technology was a spinoff of the Robonaut 2 (R2), the first humanoid robot in space. This wearable device allows the user to tightly grip tools and other items for longer periods of time without experiencing muscle discomfort or strain. An astronaut working in a pressurized suit outside the space station or an assembly operator in a factory might need to use 15 to 20 lbs of force to hold a tool during an operation. Use of the Robo-Glove, however, would potentially reduce the applied force to only 5 to 10 lbs.
The Robo-Glove is a self-contained unit, essentially a robot on your hand, with actuators embedded into the glove that provide grasping support to human fingers. The pressure sensors, similar to the sensors that give R2 its sense of touch, are incorporated into the fingertips of the glove to detect when the user is grasping an object. When the user grasps the object, the synthetic tendons automatically retract, pulling the fingers into a gripping position and holding them there until the sensor is released by releasing the object. The current prototype weighs around two pounds, including control electronics and a small display for programming and diagnostics. A lithium-ion battery, such as one for power tools, is used to power the system and is worn separately on the belt.

Foot Pedal Controller
The Foot Pedal Controller enables an operator of a spacecraft, aircraft, or watercraft, or a simulation of one in a video game, to control all translational and rotational movement using two foot pedals. This novel technology allows control across all six degrees of freedom, unlike any technology on the market. The components of the technology are a support structure, a left foot pedal, a right foot pedal, and supporting electronics. The Foot Pedal Controller is intuitive, easy to learn, and has ergonomic features that accommodate and stabilize the operator's feet. A working prototype is available to demonstrate key technology features to potential licensees.
The Foot Pedal Controller technology could be used in designs for the flight deck of the future, video game controls, drone operations and flight simulators. This technology can be useful in any application where it is preferred or desirable to use the feet to control motion rather than using the hands. A potential market could be foot control of equipment by people with arm or hand disabilities. A unique aspect of the innovation is the consideration of natural foot mechanics in the design and placement of the sensors and actuators to reduce operator fatigue. The axes of rotation of the Controller align with the joints of the foot so the foot moves naturally to control the movement of the craft. NASA seeks collaborations with companies interested in licensing and partnering to further develop and commercialize the technology.

Split-Ring Torque Sensor
The SRTS enables measurement of position, velocity, and torque of a rotating system (e.g., actuator, motor, crankshaft, rotor, etc.) using two optical sensors and a single, custom-designed split-ring rather than the standard dual-ringed systems commonly used for similar applications. The split-ring is comprised of two structural arcs positioned in a concentric, coplanar relationship, wherein each arc is attached to a component capable of rotation (e.g., a lower leg and upper leg, where the SRTS acts as a knee). The two arcs contain indications or codes on their outer surfaces that are read by the optical sensors to determine the relative deflection of the structural arcs as they rotate.
The SRTS configuration discussed above is limited to 180-degree applications. The addition of a third structural arc and a third optical reader, however, would enable 360-degree functionality.
Tests have shown the SRTS has a high degree of tolerance to temperature differences and provides higher resolution measurements than competing technologies.

Advanced Robotic Sensing Technologies
Visual Perception System: Key to enabling humanoid robotics to perform dexterous tasks, R2’s visual perception system (U.S. Patent No. 8,244,402) – comprised of machine vision cameras, processors, and novel algorithms – allows robots to find, track, and measure objects automatically in their field of view.
Tendon Tension Sensor: Unique tendon tensions sensors (U.S. Patent Nos. 8,371,177 & 8,056,423) are embedded in R2’s palms to enable granular force control of the fingers via a redundant network of tendons. R2’s tendons are coupled to, and used to actuate, the robot’s finger joints. Thus, tendon tension measurements provided by the sensor allow for the external loads experienced by its robotic fingers to be derived.
Tactile System: R2’s hands feature an innovative tactile system that grant the robot a sense of touch (e.g., measurement of external contact forces, shear force, and slippage of objects held in the hand) – an important requirement for robots designed to perform complex tasks in an automated fashion. The tactile system is enabled by novel six degree of freedom (DoF) force torque sensors (U.S. Patent No. 7,784,363), which are integrated into the fingers at each phalange (14 per hand). A calibration system (U.S. Patent No. 8,265,792) ensures the sensors maintain high accuracy throughout operation.
Contact State Estimation: A contact state estimation sensor (U.S. Patent No. 8,280,837), based on the use of a particle filter, enables R2 to perceive the location, orientation, and shape of objects when in contact with the robot’s hands (i.e., tracks hand-object state). The contact state estimation system leverages a novel motion model, which characterizes the motion of a robotic hand as it moves relative to an object of interest.
Series Elastic Actuator (SEA) Sensing: R2’s SEAs achieve fine torque sensing at each of its joints without sacrificing strength or payload capacity. The robot uses two 19-bit absolute angular position sensors, calibrated using a novel technique (U.S. Patent No. 8,250,901), to measure the deflection of each spring in real time.

ARC ANGEL Reduces Gravity’s Effect on Arms
ARC ANGEL is an active robotic system like ARGOS; however, its electric motor is not mounted overhead to a runway and bridge system, but instead is mounted to the test subject’s backpack-like PLSS where the motor(s) supplies real-time actuation torque off-loading to the upper arms via cabling. If a test subject picks-up a hammer, the system will react immediately to offload the weight of the hammer relative to the programmed environment.
The ARC ANGEL system is comprised of an electric motor(s), soft goods, electronics hardware, firmware, and software. To provide a smoothly operating arm offloading analog and optimize system performance, engineers at JSC coded software that leverages kinematic algorithms and closed-loop architecture for motor control, along with custom computer language scripts to ingest sensor data. This allows ARC ANGEL’s subsystems to be seamlessly integrated and accurately simulate one to zero G environments.
During operation, compact tension sensors and inertial measurement units detect arm weight and motion and provide a closed-loop control system that feeds data to a single-board computer and requisite firmware for processing. A custom graphical user interface was also developed in-house to provide controls for inputting desired arm offload values. Additionally, ARC ANGEL features its own power supply that provides power to its subcomponents without external cables. This allows the ability to function independently from ARGOS and further lends itself to potential terrestrial applications.
This work directly correlates to active exosuit development that is being implemented for rehabilitation and/or assistive medical devices. ARC ANGEL is essentially providing a desired assistance (offload) while maintaining a subject’s full range of motion. The system hardware and software can be modified to custom-fit an individual without a spacesuit and toward limb-assisted movement – not just arm offloading. ARC ANGEL may already meet a higher physical demand and robustness given that it is engineered to perform in challenging environments with greater loads.
ARC ANGEL is at a technology readiness level (TRL) 5 (component and/or breadboard validation in laboratory environment) and is now available for patent licensing. Please note that NASA does not manufacture products itself for commercial sale.

