Search
Mechanical and Fluid Systems
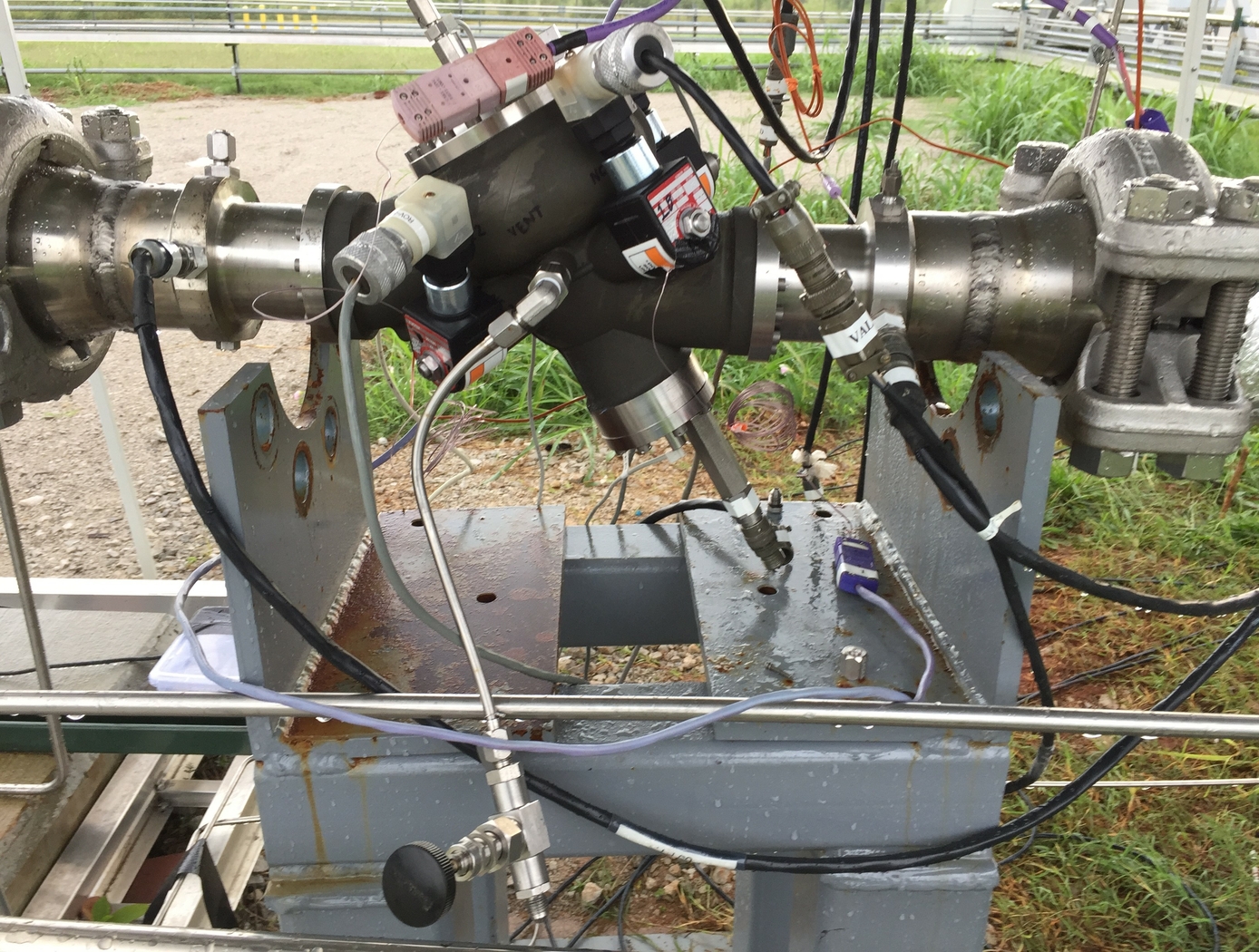
Cryogenic Hydraulically Actuated Isolation Valve
NASA's cryogenic isolation valve technology uses solenoid valves powered by direct current (DC) electrical energy to control and redirect the energy stored in the upstream line pressure. Powering the solenoid valves only requires a DC power source capable of supplying 22 watts that can be distributed and controlled in an on/off manner. By achieving actuation using only upstream line pressure and a 22-watt DC power source, many additional support systems that are required for electromechanical and pneumatic actuation are eliminated. This reduction of parts results in several benefits, including reduced footprint, weight, and potential cost of the valve in addition to lower energy consumption.
NASA fabricated several operational prototype valves using this technology for a rocket company. The table below shows the results of tests performed on these valves under cryogenic conditions. Please contact the NASA MSFC Technology Transfer Office for additional information.
Robotics Automation and Control

Advanced Humanoid Robotic Hand Technologies
The R2 hand and forearm assembly represents the cutting edge of humanoid robotics technologies. The highly modular design provides significant improvements over prior humanoid robotic hands, especially in the areas of strength, speed, sensing, and ability to approximate human grasps.
<i>Hand, Finger, and Wrist Assembly Design:</i> The robotic humanoid lower arm design (U.S. Patent No. 9,505,134) includes novel robotic finger (U.S. Patent No. 8,562,049), thumb (U.S. Patent No. 8,424,941), and wrist (U.S. Patent No. 8,498,741) assemblies.
<i>Actuation & Control System:</i> A novel finger actuation system (U.S. Patent No. 8,467,903) – comprised of an actuator, tendon, conduit, tension sensor (U.S. Patent No. 8,371,177), and terminator – is perhaps the primary enabling technology for R2’s compact, high performance robotic hand. The actuation system is packaged in the wrist (U.S. Patent No. 8,401,700) and reduces the number of actuators, providing significant space savings. Control systems include methods for tensioning (U.S. Patent Nos. 8,412,376, 8,618,762, & 8,056,423) and controlling torque (U.S. Patent No. 8,565,918) of the tendon-driven robotic fingers. The finger actuation control system (U.S. Patent No. 8,489,239) can operate using force- or position-based control laws.
<i>Tactile System:</i> R2’s hands feature an innovative tactile system that grant the robot a sense of touch (e.g., measurement of external contact forces, shear force, and slippage of objects held in the hand) – an important requirement for robots designed to perform complex tasks in an automated fashion. The tactile system is enabled by novel six degree of freedom (DoF) force torque sensors (U.S. Patent No. 7,784,363), three of which are integrated into the fingers (at the proximal, medial, and distal phalanges) and two in the thumb (medial and distal phalanges). A calibration system (U.S. Patent No. 8,265,792) ensures the sensors maintain high accuracy throughout operation.
<i>Autonomous Grasping:</i> A novel grasp assist device (U.S. Patent No. 9,878,452 & 9,067,319) enables reliable, autonomous interaction with a broad range of objects (e.g., tools). A particle filter-based contact state estimation device (U.S. Patent No. 8,280,837) performs object localization and characterization.
Materials and Coatings
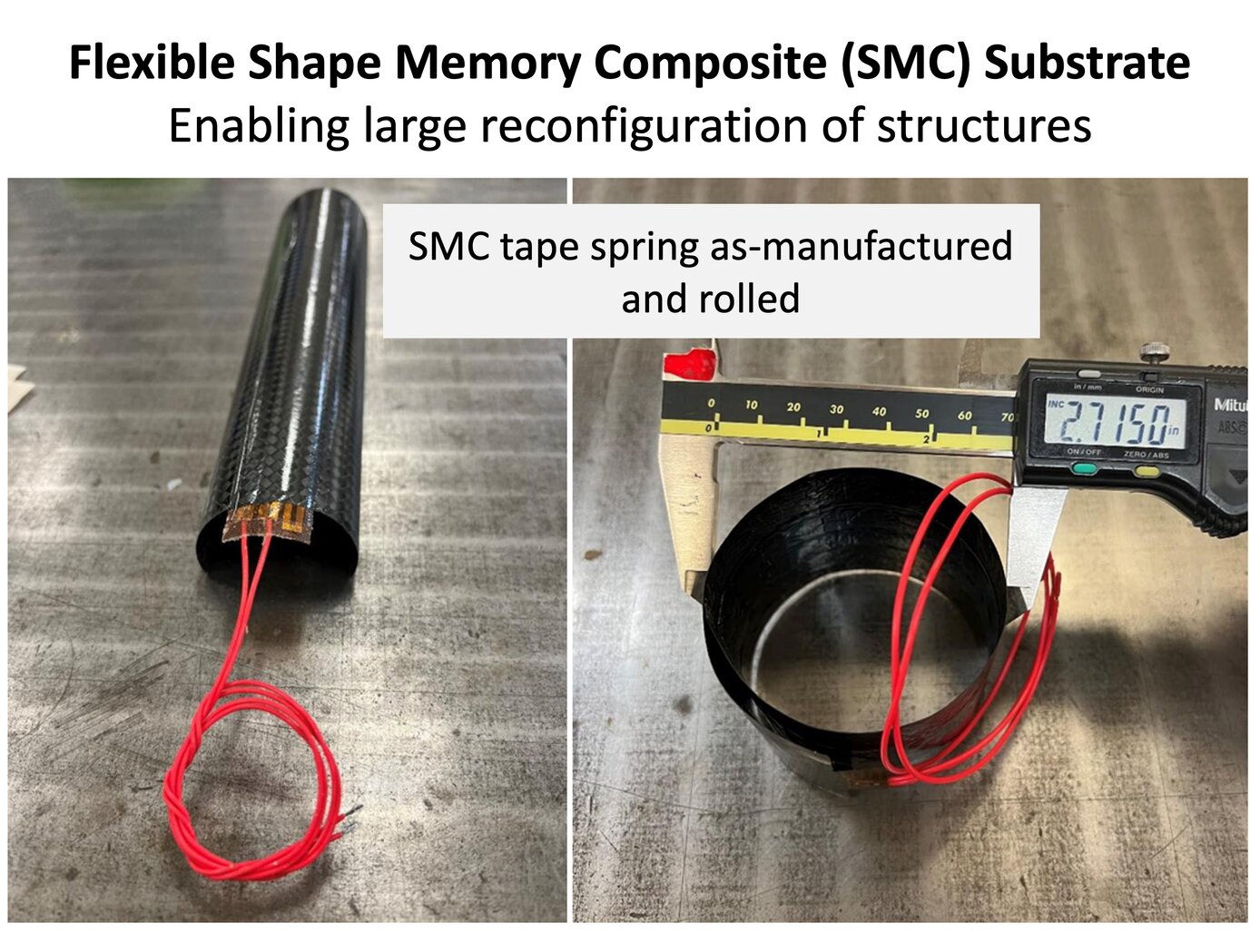
Novel Shape Memory Composite Substrate
The new SMC substrate has four components: a shape memory polymer separately developed at NASA Langley; a stack of thin-ply carbon fiber sheets; a custom heater and heat spreader between the SMC layers; and integrated sensors (temperature and strain). The shape memory polymer allows the as-fabricated substrate to be programmed into a temporary shape through applied force and internal heating. In the programmed shape, the deformed structure is in a frozen state remaining dormant without external constraints. Upon heating once more, the substrate will return slowly (several to tens of seconds) to the original shape (shown below).
The thin carbon fiber laminate and in situ heating solve three major pitfalls of shape memory polymers: low actuation forces, low stiffness and strength limiting use as structural components, and relatively poor heat transfer. The key benefit of the technology is enabling efficient actuation and control of the structure while being a structural component in the load path. Once the SMC substrate is heated and releases its frozen strain energy to return to its original shape, it cools down and rigidizes into a standard polymer composite part. Entire structures can be fabricated from the SMC or it can be a component in the system used for moving between stowed and deployed states (example on the right). These capabilities enable many uses for the technology in-space and terrestrially.
Manufacturing
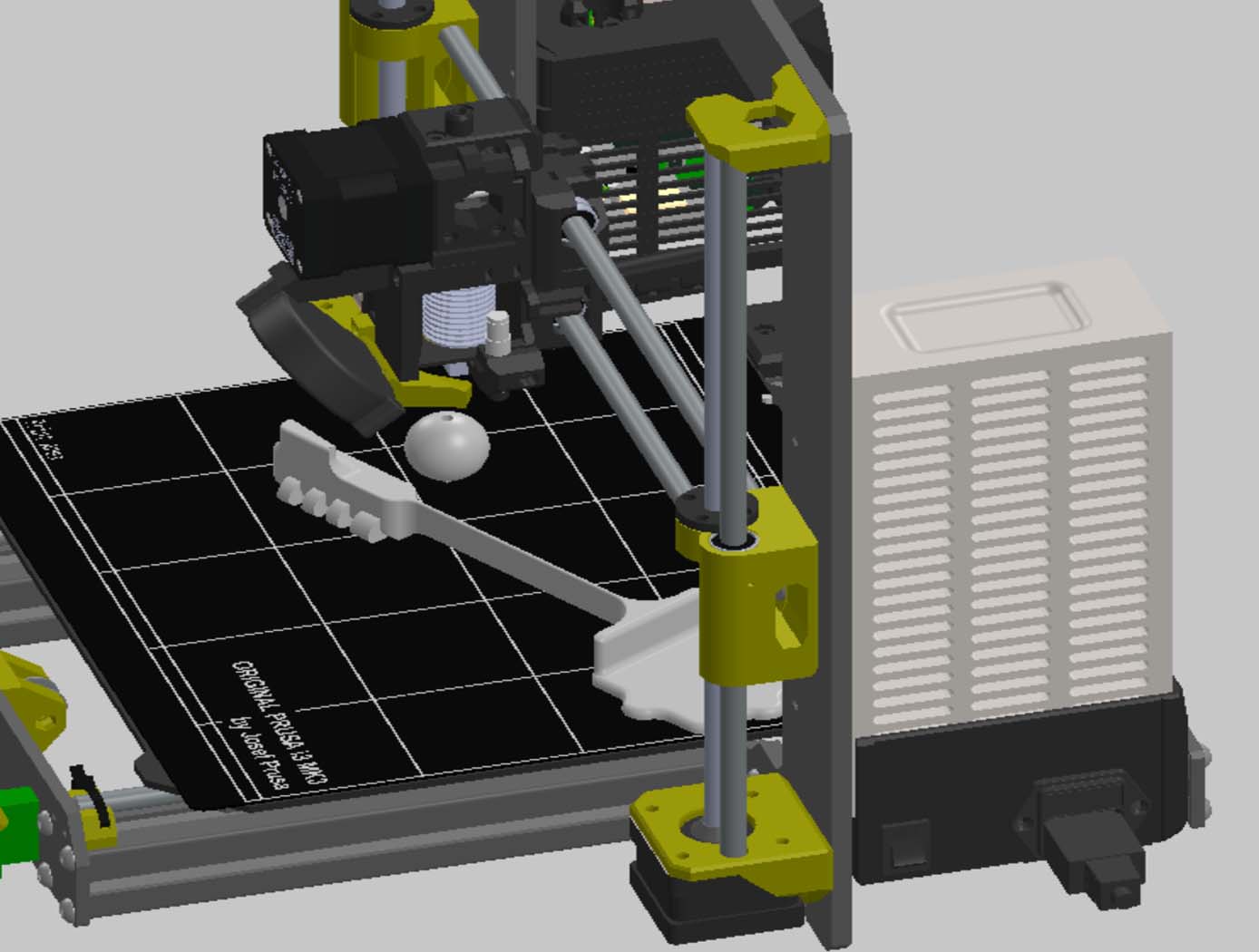
Fully Automated High-Throughput Additive Manufacturing
The technology is a method to increase automation of Additive Manufacturing (AM) through augmentation of the Fused Filament Fabrication (FFF) process. It can significantly increase the speed of 3D printing by automating the removal of printed components from the build platform without the need for additional hardware, which increases printing throughput. The method can also be leveraged to perform automated object testing and characterization. The method includes embedding into the manufacturing instructions methods to fabricate directly onto the build platform an actuator tool, such as a linear spring. The deposition head can be leveraged as a robotic manipulator of the actuator tool to bend, cock, and release the linear spring to strike the target manufactured object and move it off the build platform of the machine they were manufactured on. The ability for an object to 'fly off of the machine that made it' essentially enables automated clearing of the processed build volume. The technology can also be used for testing the AM machine or the feedstock material by successively fabricating prototypes of the manufactured object, and taking measurements from sensors as the actuator strikes the prototype. This provides automated testing for quality control, machine calibration, material origins, and counterfeit detection.
Robotics Automation and Control

Upper Body Robotic Exoskeleton
NASA's soft, portable, wearable robotic device is "plug and play" - it includes all necessary electronics, actuation, software, and sensors required to achieve augmented limb movement. The garment is designed such that the human-robot interface distributes load across the torso, maximizing user comfort. Donning and doffing is simple, as the device lowers over the head, straps to the torso via Velcro, and possesses adjustable custom arm cuffs. Actuators are housed in the back of the garment, which pull custom conduit-tendon-based systems attached to the limb at optimized locations, causing the joint of interest to move to the specified orientation. Force sensing is employed to enable optimal control of the limb, measuring user-applied force to maintain commanded joint orientations. Integrated electronics and software provide power distribution, safety monitoring, data transfer and data logging.
NASA's garment has multiple modes of operation. In active assist mode, shoulder abduction and flexion, and elbow flexion, may be commanded either simultaneously via coordinated control or individually while holding position/orientation of the other joints. In passive assist mode, the user can freely move the limb while the system provides minimal torque to the shoulder and elbow.
The upper body robotic exoskeleton is at a TRL 6 (system/subsystem prototype demonstration in a relevant environment) and it is now available for your company to license and develop into a commercial product. Please note that NASA does not manufacture products itself for commercial sale.

