Search
Robotics Automation and Control

Advanced Humanoid Robotic Interface & Control
<i>Technologies for Safe Workspace Control of Humanoid Robots:</i> Safety is critical in scenarios where humans (e.g., factory workers or astronauts) are working in proximity to, or interacting with, R2. Methods for applying workspace limitations in velocity-controlled robotic mechanisms (U.S. Patent No. 8,676,382) and force or impedance-controlled robots (U.S. Patent No. 8,483,877) help to ensure such safety.
<i>Autonomous Control Systems for Humanoid Robotics:</i> A multiple priority operation space impedance control system (U.S. Patent No. 8,170,718) provides arm control, including programmable Cartesian stiffness. An interactive robot control architecture (U.S. Patent Nos. 8,364,314, and 8,260,460, and 8,706,299), including a simple GUI, provides an interactive development and work environment that integrates sensor data and feedback generated by R2. An additional system selects and controls appropriate manipulators to perform grasping operations (U.S. Patent No. 8,483,882).
<i>Humanoid Robotic Health Management System:</i> A diagnostics, prognostics, and health management system for human robotics (U.S. Patent No. 8,369,992) operates at all hardware and software levels of the robotic system, enabling system-wide observability, controllability, maintainability, scalability, and extensibility.
<i>Electromagnetic Motor Braking:</i> Electromagnetic fail-safe brakes (U.S. Patent No. 8,067,909) allow for selective, reliable braking of robotic motors (e.g., brushless DC motors) to ensure safe and effective operation.
<i>Highly Durable Connector Pin:</i> To address the high failure rate of connectors in robotic systems with flexible members, a highly durable connector pin (U.S. Patent No. 8,033,876) was developed. The pin increases durability of connectors that are frequently flexed – a condition that causes deformation and compromises connectivity.
Robotics Automation and Control
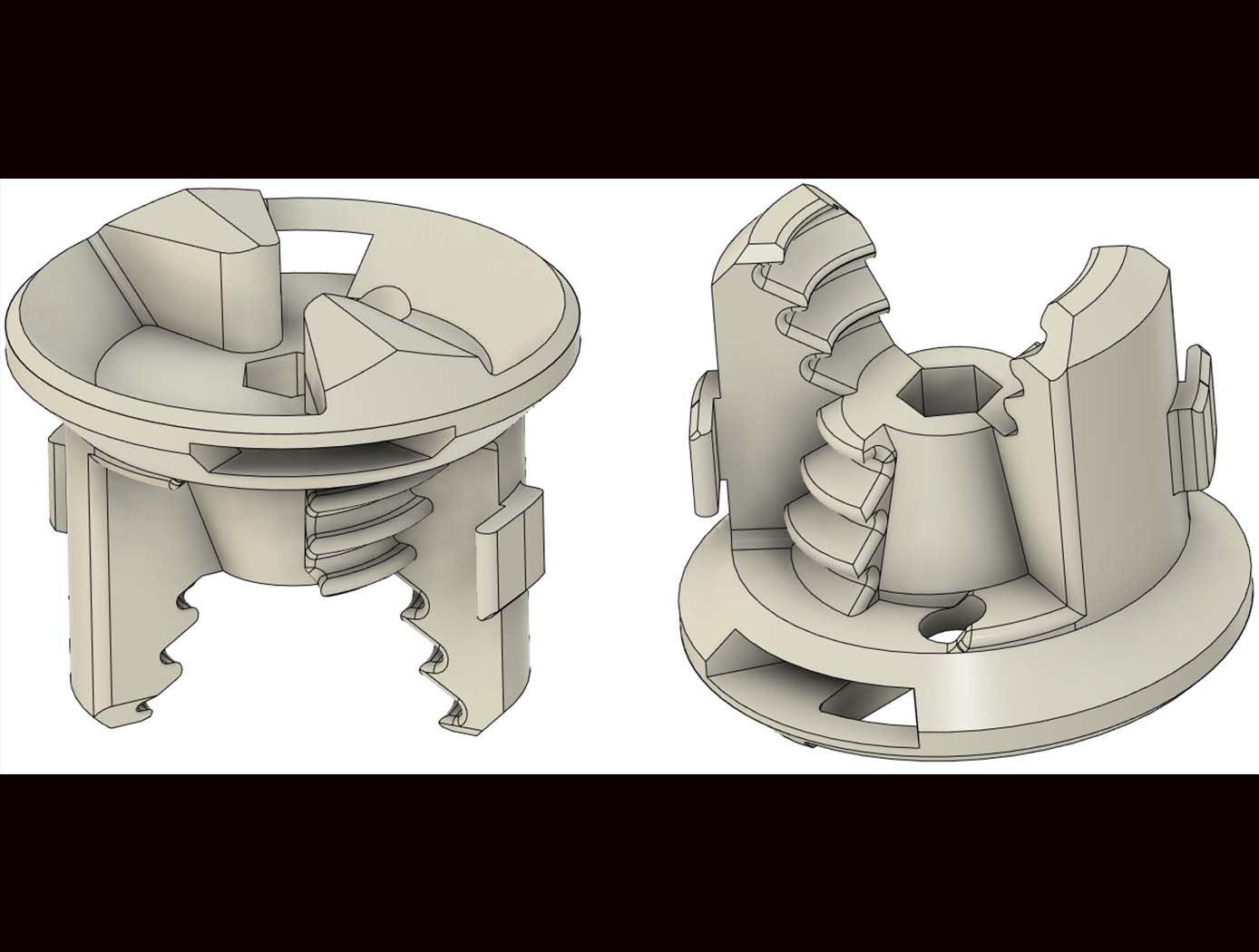
Reversible Androgynous Mechanical Fastener
The androgynous fastener is lightweight and facilitates assembly through simple actuation with large driver-positioning tolerance requirements. This fastener provides a high-strength, reversible mechanical connection and may be used in high strength-to-weight ratio structural systems, such as lattice structure systems. The androgynous fastener resists tensile and shear forces upon loading of the lattice structure system thereby ensuring that the struts of the lattice structure system govern the mechanical behavior of the system. The androgynous fastener eliminates building-block orientation requirements and allows assembly in all orthogonal build directions. This androgynous fastener may be captive in building-block structural elements thereby minimizing the logistical complexity of transporting additional fasteners. Integration of a plurality of the androgynous fasteners into a high performance, robotically managed, structural system reduces launch energy requirements, enables higher mission adaptivity and decreases system life-cycle costs. The androgynous fastener is beneficial in any application where robotic end effectors are used to join structural components (or other parts) together. It may be particularly desirable for applications requiring frequent movement of hardware to an assembly site to replace joint connections.

