Search
Robotics Automation and Control

High Stiffness Self Leveling Platform
The HSSLP employs a three-point architecture integrated with motorized jackscrews and an inertial measurement unit (IMU) to achieve automated leveling across uneven terrain. Each leg provides multiple degrees of freedom, enabling both rotational and translational adjustments to maintain a stable platform on inclines up to 15 degrees. Once positioned, the system can hold its orientation without continuous power, reducing energy consumption and improving reliability in remote or resource-limited environments. Redundancy is built into the design through multiple actuators and independent control capability, allowing the platform to maintain functionality even if one actuator fails. The design is inherently scalable, allowing adaptation for payloads ranging from small instruments to multi-ton structures without sacrificing stiffness or stability.
Originally developed for a lunar crane on the Lightweight Surface Manipulation System (LSMS), the platform has been tested in relevant environments to validate its structural integrity and load-handling performance, including successful support of a 35 kg payload at a 2-meter reach. Beyond space applications, HSSLP offers significant advantages for terrestrial industries such as construction, surveying, renewable energy, and film production. By eliminating manual adjustments and providing automated, high-load leveling capability, this technology enables faster deployment, improved safety, and greater operational efficiency in challenging environments. The HSSLP is currently assessed at a TRL 6 and is available for patent licensing.
Aerospace
Aerospace Vehicle Entry Flightpath Control
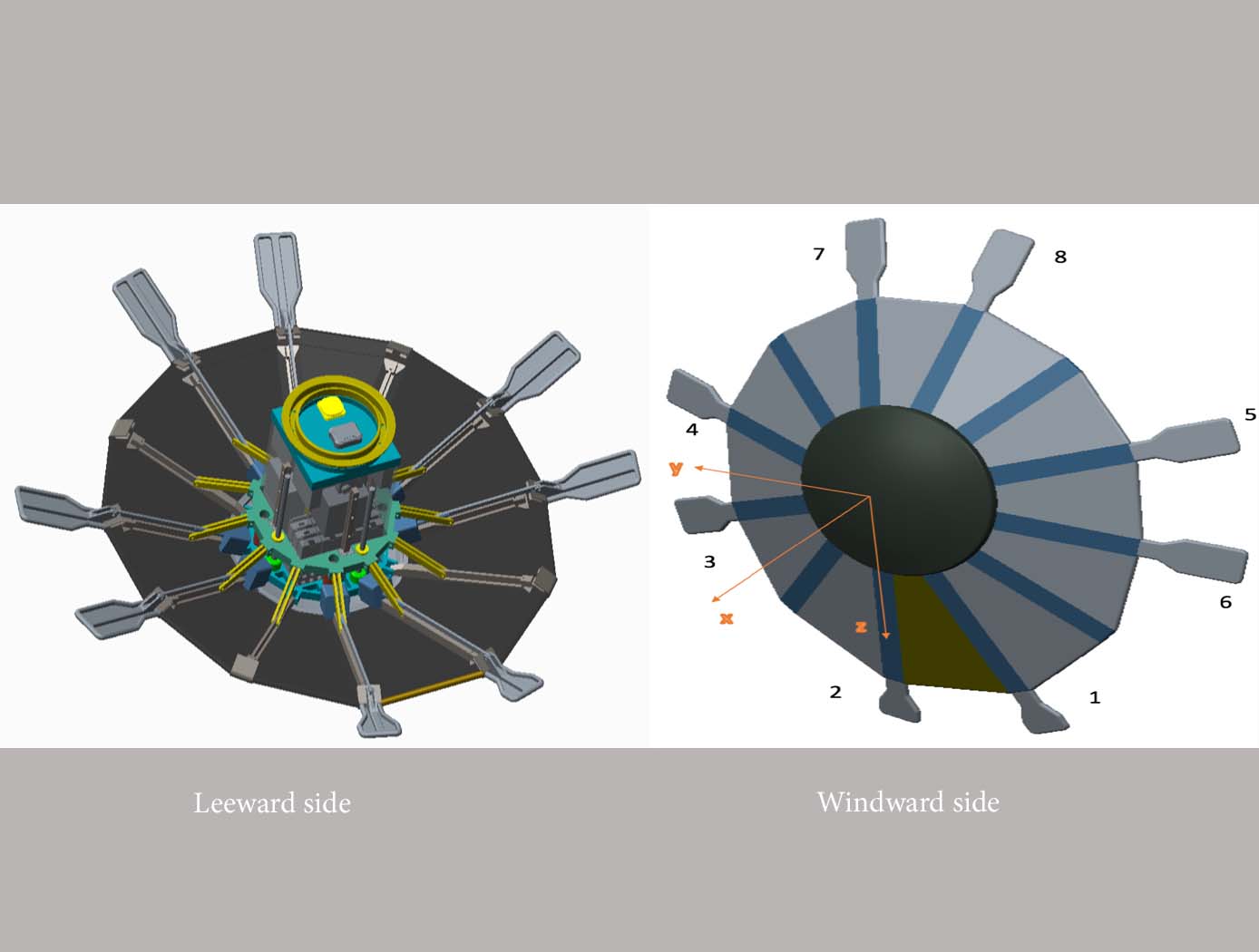
This novel flightpath control system exploits the dihedral effect to control the bank angle of the vehicle by modulating sideslip (Figure 1). Exploiting the dihedral effect, in combination with significant aerodynamic forces, enables faster bank accelerations than could be practically achieved through typical control strategies, enhancing vehicle maneuverability. This approach enables vehicle designs with fewer control actuators since roll-specific actuators are not required to regulate bank angle. The proposed control method has been studied with three actuator systems (figure below), Flaps Control System (FCS); Mass Movement Control System (MMCS); and Reaction Control System (RCS).
• FCS consists of a flap configuration with longitudinal flaps for independent pitch control, and lateral flaps generating yaw moments. The flaps are mounted to the shoulder of the vehicle’s deployable rib structure. Additionally, the flaps are commanded and controlled to rotate into or out of the flow. This creates changes in the vehicle’s aerodynamics to maneuver the vehicle without the use of thrusters.
• MMCS consists of moveable masses that are mounted to several ribs of the DEV heatshield, steering the vehicle by shifting the vehicle’s Center of Mass (CoM). Shifting the vehicle’s CoM adjusts the moment arms of the forces on the vehicle and changes the pitch and yaw moments to control the vehicle’s flightpath.
• RCS thrusters are mounted to four ribs of the open-back DEV heatshield structure to provide efficient bank angle control of the vehicle by changing the vehicle’s roll. Combining rib-mounted RCS thrusters with a Deployable Entry Vehicle (DEV) is expected to provide greater downmass capability than a rigid capsule sized for the same launch

