Search
Sensors

RFID Tags Collaborate for Data Retrieval
Commonly used RFID protocols are widely accepted because they are inexpensive and easy to implement. However, the associated low transmit power and narrow bandwidth typically result in coarse local-ization estimates. Often it is desirable to know the precise location of assets without reverting to an entirely different and more expensive protocol. Additionally, many industrial and other applications may desire technology that confirms the mating of components. This new program-mable sensor tag technology facilitates both precise localization and mating confirmation in-part by allowing the RFID sensor tag to become a type of distributed low-cost reader.
To determine a tag attachment, this innovation utilizes a fixed location RFID sensor tag that incorporates a receptacle node to measure an electrical “influence” through resistance, capacitance, inductance, etc. Assets for which localization is desired are outfitted with “influence tags” – devices that produce a set of distinguishable responses when placed in the receptacle region of the RFID sensor tag. Mating or connections are confirmed when electrodes from an influence tag become attached to matching electrodes on a sensor tag’s receptacle node. Information obtained by the RFID sensor tag is stored in its local memory bank through which a dedicated reader can retrieve influence tag information.
Potential applications exist for this technology where specific assets need to be precisely located and/or confirmation is needed when two parts have been correctly connected or attached. This RFID tag technology allows the retrieval of inventory status information in an energy efficient manner from inexpensive, small form factor hardware. Robotic retrieval of assets can be more easily facilitated with this innovation.
Sensors
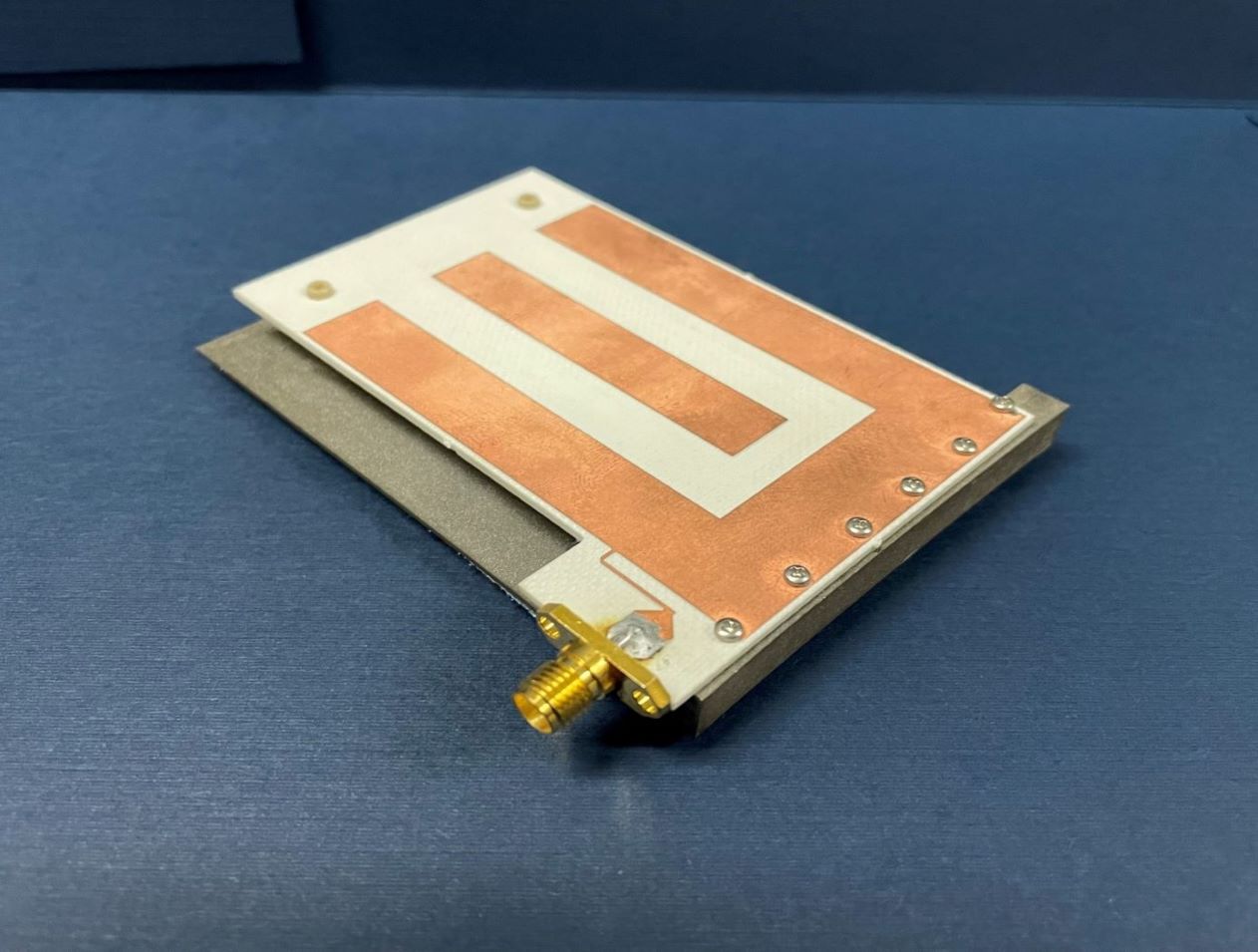
Low Mass Antenna Boosts RFID Device Performance
NASA’s HYDRA system enables a new approach in routing the RFID signal, greatly increasing extensibility and the number of antennas that can be served by a single reader. However, increasing the number of antennas in any environment is often undesirable unless the antenna size is inconspicuous. Basing this RFID dual mode antenna on a quarter-wavelength structure allows it to be smaller than an antenna designed for half-wavelength structure, reducing overall mass.
NASA’s RFID dual mode antenna is enabled by utilizing two different types of resonance modes – a “slot” mode and a microstrip “patch” mode. An innovative feed architecture allows for coupling from the RFID reader into both modes, with the impedance of each mode approximately equal at respective resonant frequencies. The antenna is designed such that each mode resonates at a different portion of the operating bandwidth, and further with each mode radiating an orthogonal polarization to the other. Frequency-hopping RFID protocols, used in conjunction with this antenna, result in the polarization diversity required for readers to reliably communicate with arbitrarily oriented RFID tags.
Numerous commercial applications exist for this RFID dual mode antenna. Examples may include usage in a multiple antenna architecture that is connected to a single reader in an open-air region, in a small, enclosed region such as a cabinet drawer, or through a combination of open and closed regions.
This RFID dual mode antenna has a technology readiness level (TRL) 7 (system prototype demonstrated in an operational environment) and is now available for patent licensing. Please note that NASA does not manufacture products itself for commercial sale.
aerospace

Virtual Aircraft Target Generator for ADS-B Testing
The Virtual Target Generator (VTG) is a system designed to create radio frequency (RF) signals that mimic the presence of nearby aircraft, for testing satellite-based surveillance systems. The VTG works by using a GPS receiver or other position data source to calculate a virtual target position, which may be calculated by applying predefined offsets and trajectories relative to the host. These virtual positions are encoded into standard message formats, such as ADS-B, and modulated onto an RF carrier signal.
The VTG includes a calibrated signal amplifier that adjusts the signal power so only the target test aircraft receives the signal, ensuring no other aircraft are affected. The test aircraft's surveillance avionics detect and interpret these virtual targets as if they were actual aircraft, enabling full participation in the testing of traffic collision avoidance, surveillance, or display systems.
The VTG supports complex test scenarios including dynamic movement, multiple simultaneous targets, and customizable aircraft parameters such as speed, heading, and altitude. The system is fully compliant with FAA ADS-B specifications and can be installed on the test aircraft itself or on a nearby companion aircraft.
Health Medicine and Biotechnology

Expanded COBRA Oculometrics (ECO) to Include Perimetry and Directional Assessment of Visual and Visuomotor Performance
Expanded COBRA Oculometrics (ECO) expands the oculometric assessment into the peripheral visual field and sub-divides the visual field into sub-regions defined by their eccentricity (ring) and angular range (sector) for more direct comparison with current state-of-the-art clinical imagining (e.g., OCT (Optical Coherence Tomography)) and functional testing (e.g., perimetry) methodologies. ECO improves on COBRA in two ways, 1) ECO probes multiple rings at multiple eccentricities (nominally at ~3 and ~6 deg of eccentricity to correspond to classic OCT imaging measures) and 2) ECO subdivides the conventional COBRA analysis into angular sectors (nominally into Nasal, Temporal, Superior, and Inferior quadrants again to correspond to classic OCT imaging measures but also potentially into more refined octants) to sub-sample the retina (monocularly) or the visual field (binocularly), thus parceling the data into smaller subregions organized in polar coordinates to better correspond to classic OCT imaging and other clinical imaging measures. This enables ECO to detect spatially localized impairments that would otherwise be blurred out by larger healthy regions of the retina/brain and allows for direct comparison with clinical OCT results and other clinical imaging systems. ECO sectors/rings could be tailored to enable comparison with brain MRI/A (Magnetic Resonance Imaging/Angiography) or CAT (Computer Aided Tomography) commonly used in neurology clinics so that the structural damage or pathology revealed by these standard imaging techniques can be correlated to actual function loss in corresponding sub-regions of the visual field in support of both clinical and research applications.
Instrumentation

LED Intensity Decay Particle Tracking Velocimetry (PTV)
NASA’s LED-ID PTV system illuminates a seeded flow with an LED rather than a laser. Instead of using double-pulsed laser flashes to capture two separate images of particle positions, the system relies on the inherent intensity decay of an LED pulse to encode velocity information directly into a single long-exposure image. The LED’s light intensity decreases over time due to capacitor discharge characteristics of the driving circuit. This controlled decay serves as a built-in intensity marker, allowing for precise determination of particle velocity and directionality without requiring an actively modulated light source.
In a single-color configuration, a monochrome camera captures a long- exposure image of particle streaks as they move through the illuminated region. Because the light intensity is continuously decreasing, the recorded streaks naturally encode velocity information based on their brightness gradient. Faster-moving particles create longer streaks, while slower particles form shorter ones. The intensity variation across the streak provides additional data about directionality, enabling flow field analysis with a minimal hardware setup. For more complex flow analysis, a two-color configuration can be employed to track three- dimensional motion. In this setup, two LEDs of different colors are positioned adjacent to each other to create overlapping light sheets. A color camera, or two monochrome cameras with a dichroic mirror, captures the streaks of particles as they move between these sheets.
The color transition within a particle’s streak indicates its movement between the planes of illumination, allowing users to resolve out-of- plane velocity components. Image processing techniques (e.g., advanced algorithms, high-pass filtering methods, sub-interval streak segmentation) further enhance the system's accuracy.
NASA’s LED-ID PTV system has been prototyped and demonstrated with excellent results, and is available for patent licensing to industry.
Robotics Automation and Control

Anonymous Feature Processing for Enhanced Navigation
This concept presents a new statistical likelihood function and Bayesian analysis update for non-standard measurement types that rely on associations between observed and cataloged features. These measurement types inherently contain non-standard errors that standard techniques, such as the Kalman filter, make no effort to model, and this mismodeling can lead to filter instability and degraded performance.
Vision-based navigation methods utilizing the Kalman filter involve a preprocessing step to identify features within an image by referencing a known catalog. However, errors in this pre-processing can cause navigation failures. AFP offers a new approach, processing points generated by features themselves without requiring identification. Points such as range or bearing are directly processed by AFP.
Operating on finite set statistics principles, AFP treats data as sets rather than individual features. This enables simultaneous tracking of multiple targets without feature labeling. Unlike the sequential processing of the Kalman filter, AFP processes updates in parallel, independently scoring each output based on rigorous mathematical functions. This parallel processing ensures robust navigation updates in dynamic environments, and without requiring an identification algorithm upstream of the filter.
Computational simulations conducted at Johnson Space Center demonstrate that AFP's performance matches or exceeds that of the ideal Kalman filter, even under non-ideal conditions. Anonymous Feature Processing for Enhanced Navigation is at a technology readiness level (TRL) 4 (component and/or breadboard validation in laboratory environment) and is now available for patent licensing. Please note that NASA does not manufacture products itself for commercial sale.
Information Technology and Software

Computer Vision Lends Precision to Robotic Grappling
The goal of this computer vision software is to take the guesswork out of grapple operations aboard the ISS by providing a robotic arm operator with real-time pose estimation of the grapple fixtures relative to the robotic arm’s end effectors. To solve this Perspective-n-Point challenge, the software uses computer vision algorithms to determine alignment solutions between the position of the camera eyepoint with the position of the end effector – as the borescope camera sensors are typically located several centimeters from their respective end effector grasping mechanisms.
The software includes a machine learning component that uses a trained Region-based Convolutional Neural Network (R-CNN) to provide the capability to analyze a live camera feed to determine ISS fixture targets a robotic arm operator can interact with on orbit. This feature is intended to increase the grappling operational range of ISS’s main robotic arm from a previous maximum of 0.5 meters for certain target types, to greater than 1.5 meters, while significantly reducing computation times for grasping operations.
Industrial automation and robotics applications that rely on computer vision solutions may find value in this software’s capabilities. A wide range of emerging terrestrial robotic applications, outside of controlled environments, may also find value in the dynamic object recognition and state determination capabilities of this technology as successfully demonstrated by NASA on-orbit.
This computer vision software is at a technology readiness level (TRL) 6, (system/sub-system model or prototype demonstration in an operational environment.), and the software is now available to license. Please note that NASA does not manufacture products itself for commercial sale.

