Square Structural Joint with Robotic Assembly Tool
mechanical and fluid systems
Square Structural Joint with Robotic Assembly Tool (LAR-TOPS-316)
Square trusses replace round for enhanced strength and robotics compatibility
Overview
The square structural joint design enables robotic assembly and has been designed for high strength to weight, multifunctionality, and reduced manufacturing cost. They not only provide increased axial stiffness compared to round tubes of the same width, but torsional and bending strength is increased as well. Electrical conductivity and provisions for routing of wiring or tubing through the joints have been incorporated in the design as well, all enabling greater capability and a stronger structural design.
The Technology
The square form joint has several novel features to improve reliability, performance and robustness. Most simply, the square tubes are stronger than round for a specified maximum cross-section dimension.
Structural benefits include nearly complete perimeter contact geometry for improved structural efficiency, improved cantilever beam response via linear bending response about y and z axis, and linear torsional response about x axis. Additionally, there is betterlinear axial response along x axis due to simple geometry and large contact surfaces, higher torsional/torque capability (about x axis), higher bending capability about all axes, higher axial capability, and is more cost effective to manufacture. It also offers a bonding strap and treated contact surfaces that provide electrical conductivity through the joint.
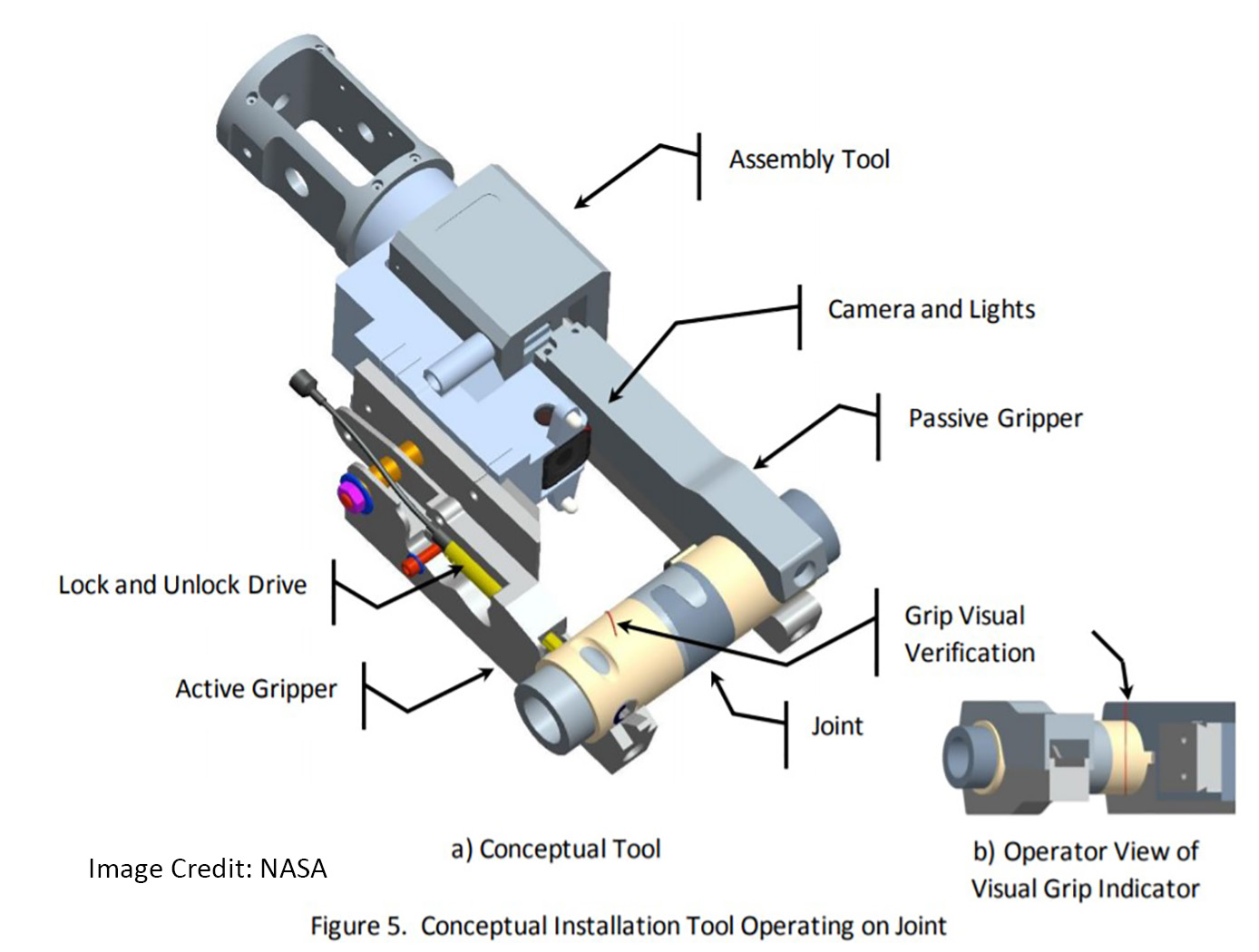
Switching to square cross section joints provides packaging efficiency, along with numerous improvements for robotic assembly applications such as providing rotational registration, robotically compatible tool designs, both mechanical and visual indicators to verify locking operation, preload and capture spring forces with a unique stop plate in the drive train that can be designed to default to the assembled condition without a preload, yet spring back if forced toward unlocked. After assembly, preload can be adjusted for security. Designed for robust assembly, the robotic tools are built to actuate the joint.

Benefits
- Improves packaging efficiency
- Improves structural efficiency in a constrained package
- Rotational registration
- High torsional/torque capability (about x axis)
- High bending capability about all axes
- High axial capability due to increased contact surface area
- Cost effective manufacturing
- Nearly complete perimeter contact geometry for improved structural efficiency
- Improved cantilever beam response via linear torsional response about x-axis and linear bending response about y- and z-axis
- Linear axial response along x-axis
- Internal stop plate can be customized to make unlock stable or unstable
- Low electrical resistance across locked joint
- Integral electrical connectors and pathways
- Robotically compatible tool drive
- Mechanical and visual indicators to verify locking operation
- Tunable preload and capture spring forces
Applications
- Portable aerospace structures suitable for on orbit / in space assembly
- Portable terrestrial structures, including clean rooms, field hospitals, decontamination rooms
Technology Details
mechanical and fluid systems
LAR-TOPS-316
LAR-18923-1
Similar Results

Multi-Link Spherical Joint
The Multi-Link Spherical Joint developed at NASA Johnson Space Center provides a substantial improvement over typical joints in which only two linearly actuated links move independently from one another. It was determined that the rotation point of a trussed link needed to be collocated at a shared point in space for maximum articulation. If not allowed separate rotation, the line of action through a universal joint and hinge acts effectively as another linkage. This leads to a much more complex and uncontrollable structure, especially when considering multiple dimensions.
Comprising the Multi-Link Spherical Joint, a spherical shell encases the cupped ends of each six possible attachments and allows each of those attachments to be independently controlled and rotated without inhibiting the motion of the others. To do this, each link is precisely limited to 15 degrees of rotation off the link centerline, thus allowing a total of 30 degrees of rotation for each link. The shell-and-cup structure can handle the loads of linear actuators that may be used to control and vary the geometry of a truss system utilizing the new joint technology. The calculated operating load that the truss system must handle can be used to scale the size of the joint, further allowing customization of any potential truss system. Additionally, the incorporated linear actuators can be controlled and powered by wiring routed through the joint without putting undo stress on the wires during operation. Accordingly, this innovative joint technology enables more efficient deployment and precise operation of articulating structures.
The Multi-Link Spherical Joint is at technology readiness level (TRL) 4 (component and/or breadboard validation in laboratory environment) and is available for patent licensing. Please note that NASA does not manufacture products itself for commercial sale.

Composite Joint Connector
This technology is a joint connector for application between two or more tubular parts, or to connect one or more tubular parts to a fixed structure. This attachment technology is more structurally efficient and reduces failure characteristics due to the uniformity of composite material across the joint. In comparison to a typical joint, this technology reduces weight while minimizing stress variations that lead to structural failure. Moreover, typical joints must be bonded or screwed together, which further reduces efficiency. The invented technology, however, is designed so that it is both bonded and mechanically locked by design rather than relying on separate mechanical fasteners. The result is a design that mitigates failure of a structural joint.

Reversible Androgynous Mechanical Fastener
The androgynous fastener is lightweight and facilitates assembly through simple actuation with large driver-positioning tolerance requirements. This fastener provides a high-strength, reversible mechanical connection and may be used in high strength-to-weight ratio structural systems, such as lattice structure systems. The androgynous fastener resists tensile and shear forces upon loading of the lattice structure system thereby ensuring that the struts of the lattice structure system govern the mechanical behavior of the system. The androgynous fastener eliminates building-block orientation requirements and allows assembly in all orthogonal build directions. This androgynous fastener may be captive in building-block structural elements thereby minimizing the logistical complexity of transporting additional fasteners. Integration of a plurality of the androgynous fasteners into a high performance, robotically managed, structural system reduces launch energy requirements, enables higher mission adaptivity and decreases system life-cycle costs. The androgynous fastener is beneficial in any application where robotic end effectors are used to join structural components (or other parts) together. It may be particularly desirable for applications requiring frequent movement of hardware to an assembly site to replace joint connections.

Advanced Humanoid Robotic Arm Technologies
R2 uses brushless DC motors, harmonic drive gear reductions, and electromagnetic failsafe brakes as the building blocks for the powerful, torque-dense actuators in its human-scale, 5 DoF upper arms. Moreover, the use of series elastic actuators and novel tension sensing & control systems represent some of the most innovative technologies present in the humanoid robotic arms of R2.
Series Elastic Actuators (SEAs): R2’s SEAs achieve fine torque sensing at each of its joints without sacrificing strength or payload capacity. Such capabilities are enabled through the development of several advanced technologies. Specifically, novel planar torsion springs (U.S. Patent No. 8,176,809) are integrated into each rotary series elastic actuator (U.S. Patent No. 8,291,788), while two absolute angular position sensors, calibrated using a novel technique (U.S. Patent No 8,250,901), measure the deflection of each spring. Force and Impedance Control Systems (U.S. Patent No. 8,525,460): These systems use position sensor signals for sending position data to an embedded processor that determines the positional orientation of the load relative to a motor shaft and its related torque on a string. A FPGA-based controller (U.S. Patent No. 8,442,684) provides a high-speed (10 KHz) control loop for the electric motor and gear reduction assembly present in R2 joints.
Tension Sensing & Control of Tendon-Based Robotic Manipulators: NASA has also developed technologies to provide tension sensing & control of humanoid robotic arms. First, a tendon tension sensor (U.S. Patent No. 8,371,177) measures strain on tendons (strings) employed in robotic arms. A novel calibration system (U.S. Patent No. 8,412,378) calibrates the tendon tension sensors. Finally, joint space impedance control systems (U.S. Patent Nos. 8,170,718 & 8,060,250) provide closed-loop control of joint torques or joint impedances without inducing dynamic coupling between joints, as well as programmable Cartesian arm stiffness.

Robonaut 2: Industrial Opportunities
NASA, GM, and Oceaneering approached the development of R2 from a dual use environment for both space and terrestrial application. NASA needed an astronaut assistant able to function in space and GM was looking for a robot that could function in an industrial setting. With this in mind, R2 was made with many capabilities that offer an enormous advantage in industrial environments. For example, the robot has the ability to retool and vary its tasks. Rather than a product moving from station to station on a conveyor with dozens of specialized robots performing unique tasks, R2 can handle several assembly steps at a single station, thereby reducing manufacturing floor space requirements and the need for multiple robots for the same activities. The robot can also be used in scenarios where dangerous chemicals, biological, or even nuclear materials are part of the manufacturing process.
R2 uses stereovision to locate human teammates or tools and a navigation system. The robot was also designed with special torsional springs and position feedback to control fine motor movements in the hands and arms. R2's hands and arms sense weight and pressure and stop when they come in contact with someone or something. These force sensing capabilities make R2 safe to work side-by-side with people on an assembly line, assisting them in ergonomically challenging tasks or working independently.
This NASA Technology is available for your company to license and develop into a commercial product. NASA does not manufacture products for commercial sale.

